
Während Jogi Löw und sein Team in Frankreich Europameister werden wollten, kämpften zeitgleich (29.6. – 4.7.) in Leipzig zwei Robotik-Teams des Kollegs der Schulbrüder um den Weltmeister-Titel im Roboter-Fußball (Robo-Cup WM).
Das “ultimate team” -mit den beiden TSV Mitgliedern Sönke Sproll und Tobias Funke – vom Kolleg der Schulbrüder, Illertissen erreichte den ersten Platz in der Primärstufe der Junioren (Individual Team 1st Place, Junior Soccer LWL primary) und ist damit Weltmeister in ihrer Altersklasse, in der insgesamt 15 Teams aus allen Kontinenten antraten. Sebastian Bäurle, Sönke Sproll, Tobias Funke, Efe Yesilgöz , Marcel Brugger und Lukas Schäfer, mit Betreuer Werner Kremer gehören zum siegreichen Team.

Zusammen mit AGSG 1 (Portugal), BnJ (Ungarn), SABA-ROBO (Japan) erhielt “Ultimate Team” zudem den Preis „Best SuperTeam Integration“ überreicht und wurde damit für ihre hervorragenden sozialen Kompetenzen in der Zusammenarbeit mit Teams anderer Länder gewürdigt.
Zur Information:
„Junior Soccer LWL primary” bedeutet: Roboter, die von maximal 14-jährigen Schülern gebaut wurden, spielen in der Gewichtsklasse bis 1100g mit ihren beiden autonom agierenden Robotern Fußball gegen die beiden Roboter ihrer Gegner. Während eines Matches kann und darf von außen auf die vorprogrammierten Roboter kein Einfluss genommen werden. Beim Bau der Roboter dürfen nur selbstgefertigte Komponenten und eigenständig programmierte Software eingesetzt werden.
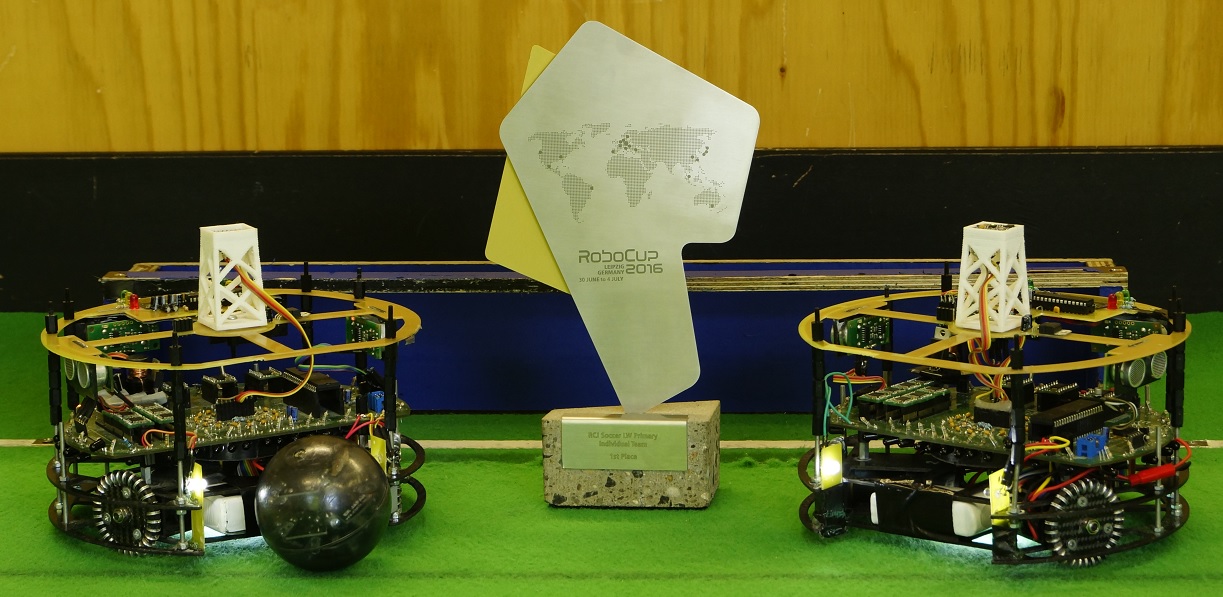
Zur Technik:
Das mechanische Gerüst des Roboters besteht zu 100 % aus Carbon, damit er über eine ausreichende Stabilität verfügt und trotzdem möglichst leicht bleibt. Die Schüler haben das Gerüst mit einem CAD-3D-Zeichenprogramm selbst entworfen und mit der schuleigenen CNC-Fräse millimetergenau ausgearbeitet. Der Roboter bewegt sich mit drei leichten und leistungsstarken Motoren von 12 V und nur 22 mm Durchmesser. Auch die Steuerzentrale ihres Fußballers ist eine Eigenentwicklung. Das Herzstück der Elektronik ist das Mainboard mit einem AT-Mega 644P, das auf die Verarbeitung und Reaktion von Sensordaten programmiert wird. 4 Ultraschallsensoren ermitteln die Abstände zu den Wänden oder zu den anderen Spielern auf dem Feld. 52 gleichmäßig um den Roboter verteilte Infrarot-Fototransistoren suchen und messen den Abstand zum IR-Licht aussendenden Ball. Ein Kompassmodul sorgt für die richtige Richtung auf dem Spielfeld. Weitere 17 Fotodioden erkennen die Aus-Linie auf dem Boden, um eine Strafzeit von einer Minute zu verhindern, welche beim vollständigen „ins Aus fahren“ verhängt wird. Eine Lichtschranke aus einer LED und einer Fotodiode erkennt, ob der Ball in der Ballkuhle des Roboters liegt.
Die Ergebnisse im Einzelnen finden sich unter http://robocup2016.org/de/spielplan-ergebnisse/ergebnisse/robocupjunior/soccer/. Wer sich noch genauer über das Team informieren will, wird demnächst unter http://ultimateteam.bplaced.net/ fündig.
(Text und Bilder: Helmut Frank und Kolleg)